
It’s time for Monday’s Finish the Story again. This is a flash fiction challenge which asks that we write a story in 150 words from the picture and first line prompt kindly provided by the host, Barbara W. Beacham.
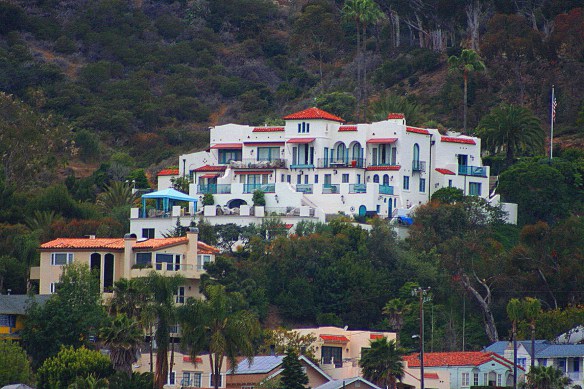
Here is this week’s photo . . .
. . . and this is my story, including the first line prompt:
A body suddenly crashed through a plate glass window at the brigadier’s house. It plummeted past Brigadier Humphreys, lounging on the balcony below. He sped upstairs and into the room, his lower jaw quivering in outrage.
‘What the deuce is going on?’ he demanded, glaring at the shattered window.
‘Relax, Brigadier,’ Mike Jewson soothed, his Texan drawl pronounced. ‘You’ll be reimbursed real well for use of your place once we’re done.’
‘B … but the body …?
Jewson shrugged. ‘No worries, man. Best way to deal with the double-crosser, is all.’
Charles Humphries glanced about the room, taking in the amused faces and their fancy equipment. ‘But you can’t just murder someone, it–’
‘ – was necessary, Brigadier,’ a tall, suave man in tux and bow tie cut in. ‘Agent 008 at your service,’ he added, grinning. ‘He was threatening British Security.’
‘Ah, that’s different then,’ the brigadier murmured as he left.
‘Go retrieve the dummy, Hank, then we roll with scene two.’
Word count: 150
To view other entries, click here.

Hahahaha nice one! Loved it!
Thank you, Joycelin! I’m glad you liked it. 🙂
This is what happens when you lend you house to a film crew 🙂
I can only imagine … ! Thanks Ali. 🙂
Yes, it does look like a James Bond setting, doesn’t it? An excellent take on the prompt 🙂
😀 Well done Millie! I love that final line! Thanks for taking part again and I hope to see you next week! Be well…. ^..^
Yes, I hope to be here again next week. Thank you for the lovley comment, Barbara. 🙂
🙂 YW!
imaginative 🙂
Glad you thought so, Heath. 🙂
I loved it Millie! Such a fun ending! I enjoyed reading every bit of it and am in awe of your excellent writing abilities.
That’s a really lovely comment PJ. But your own writing skills are good and getting better by the week. I’m impressed by your determination to improve. 🙂
Thank you Millie! I really am trying to improve and learning everything I can. You certainly are an excellent writer and I know it takes years to get that good.
It’s all a question about picking up tips along the way – and, of course, reading. There’s no better way to pick up writing skills than reading works by people really good at it. I’ve been an avid reader all my life, so things like grammar and punctuation etc. have never been a issue. I just need lessons on how to aviod typos! Haha. You’re getting there nicely, so just keep going. 🙂
Oh, yes, if you ever find out how to avoid typos, please let me know. LOL
I think a lot of us share this problem – and sadly, I don’t think there is a cure.
No, not when your mind is going faster than your fingers. 😀
Good one Millie, really clever use of the prompt 🙂
Nice job w/ the dummy. =)
I like the Bond take–I didn’t think of that possibility! Interesting!
Thanks, Emily. I love the way we all zoom in on different possibilitie. It makes reading everyone’s so much fun. 🙂
A born practical jokester, are you? 😉
Perhaps just in my imagination … 🙂
A wonderful take and an individual approach to flying bodies ~ Cut and print! ~ Excellent Millie 🙂
Thanks once again, John. 🙂
Not a very bright Brigadier, I’m guessing. Love the movie angle 😀
No’ he wasn’t very bright at all. In fact, he was decidely thick. 🙂 Thank you for commenting. 🙂
The dummy part was brilliant…Love your story always ended up with something interesting 😉 Good job Millie! 🙂
Thank you for liking my dummy, Khloe. At least I didn’t really kill someone off! 🙂
You’re welcome sweetie ❤ haha thank you for being so kind not to kill anyone at the end 😛 😛 😛
Hello Millie, I had a feeling when I started your story that there may be a film set in there somewhere. Well done.
Ah … you sussed me out this time. I’ll have to be a little more subtle next time. Haha. Thank you, Michael. 🙂
Oh well done you.
Thank you, Jay! I’m glad you liked it. 🙂
Great dialogue! 🙂
Thank you, Jason. I’m hooked on these flash fiction challenges! 🙂
Very sharp and good idea of changing the murder to a dummy and 008 explaining. Love it
Thank you, Scrapydo. I couldn’t face a gory murder this week! Haha 🙂
Hahaha! Good one Millie! I really thought he was agent 008… lol!
I’m glad you enjoyed it! Thanks, Heena. 🙂
That villa does look an awful lot like a movie set.
Yes, it reminded me of some James Bond films, too, so there must be at least one set in a place like that. Thanks, Dave. 🙂
Great twist at the end, Millie. I loved Agent 008. Well done. 🙂 — Suzanne
Thank you Suzanne! 🙂